Goal:
RC BB8 build using only analog stability, no PID control.
BB8 Build Post 1 – Initial Chassis Build
My plan is to use David Alvarez’s / Luna’s puppets strategy for a hamster style drive train. It uses parts from Servocity and Vex robotics for the main drive train, and the California Quality Plastics 20 inch polycarbonate sphere.
Using some of David’s reference photos, I’ve built the prototype.
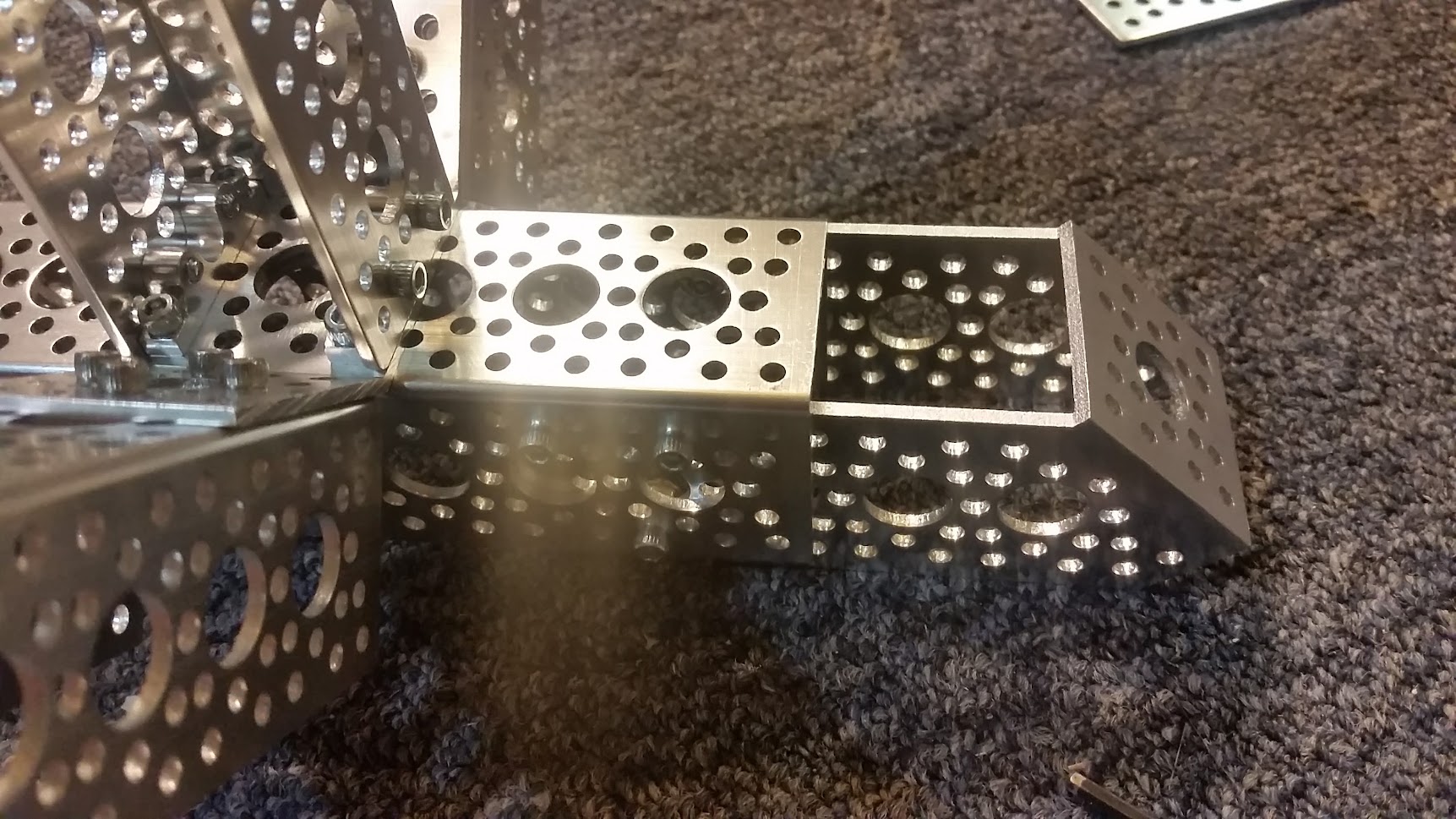
This is the first part of the chassis. The 2 wheels on the ends are non-motorized stabilizing wheels that help prevent some of the internal forward/backward wobble. The bar in the center is what will mount the head to.

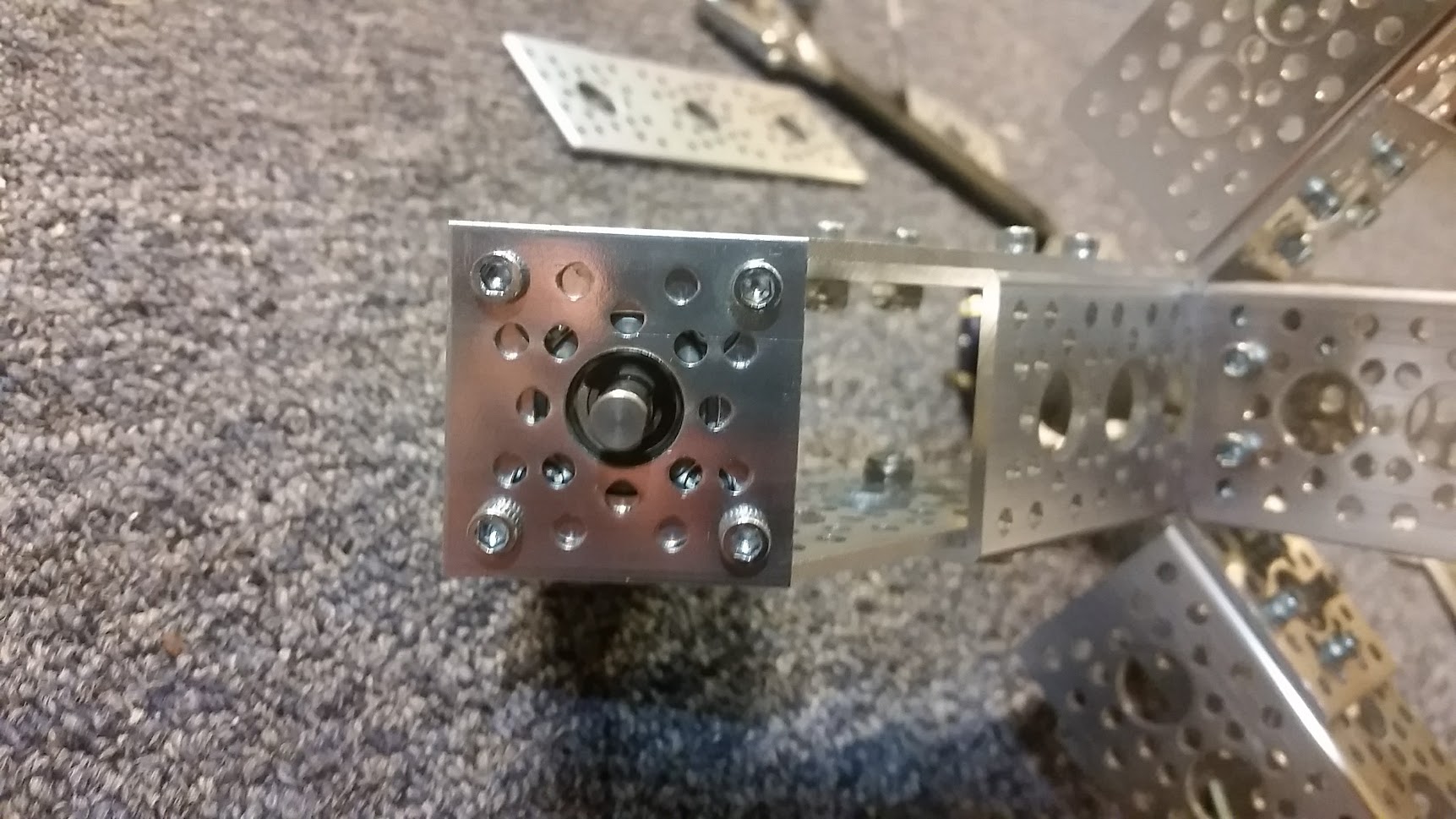
This is the planetary motor and motor hub that is used to connect it to the chassis. The inner 4 screws are used to connect the hub to the motor, and the outer holes on the hub are used to connect the assembly to the chassis.

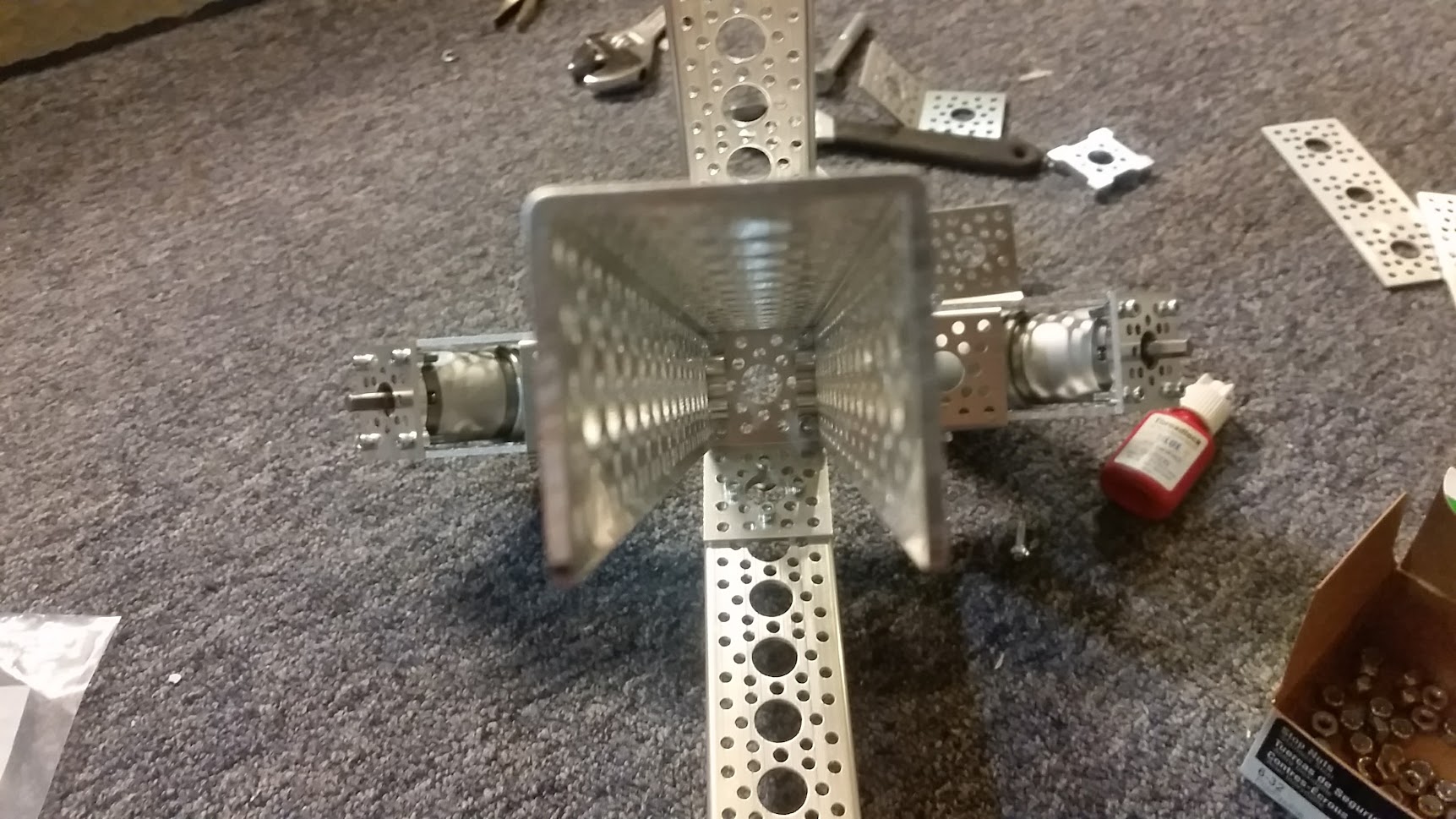
Here are some pics of the 45 degree mounts connected to the chassis. The 45 degree mount will allow the wheels to travel at an angle similar to the location within the sphere.






This picture shows the 6 inch Vex Omni wheel that’s used and the hub that will be used to connect the wheel to the motor shaft. I had to drill a hole and tap the hub to accept a 10-32 set screw to maintain the hub on the motorshaft.

More to come…….
BB8 Build Post 2 – Drive train setup
I was able to configure the drivetrain electronics for the BB8. It consists of the following:
- 1 x 3S 2.2aH lipo (temporary)
- 1 x 2 channel speed controller from Servocity
- 1 x X8R 8 Channel Frsky Receiver (able to bind 2 of these receivers – plan is to have one in the body and 1 in the head)
- 2 motors
- 2 wheels
- Frsky taranis RC Radio
The drive is explained in the following video.
A couple of days later, after some tweaking on the dimensions of the drive train, I ended up placing the hamster wheel inside the CQP ball, and taping the ball shut. On this video, there are 8 pounds of weight zip tied to the chassis to provide some stabilization.
It drove pretty well using such crude attachment methods, but it was good to know that it worked! 🙂